Системы контроля активного магнитного подвеса
| Номер в ГРСИ РФ: | РБ 03 14 6047 16 |
|---|---|
| Раздел: | Средства измерений магнитных величин [14] |
| Производитель / заявитель: | АО "РЭП Холдинг" (РЭПХ), г. Санкт-Петербург |
|
Описание типа РБ 03 14 6047 16 [2016-11-03]
rb-03-14-6047-16_2016-11-03.pdf
|
Скачать |
Системы контроля активного магнитного подвеса (далее - СКАМП) предназначены для измерений текущих значений параметров работы компрессоров, нагнетателей, генераторов, электродвигателей (далее - машин вращения): частоты вращения ротора; линейного смещения и амплитуды виброперемещения ротора машины вращения в радиальных и осевом направлениях; температуры электромагнитов системы активного магнитного подвеса ротора машины вращения.
Информация по Госреестру
| Основные данные | |
|---|---|
| Номер по Госреестру | РБ 03 14 6047 16 |
| Наименование | Системы контроля активного магнитного подвеса |
| Год регистрации | 2016 |
| Номер сертификата | 10513 |
| Дата регистрации | 2016-07-27 |
| Срок действия | 2021-02-17 |
| Получатель сертификата | АО "РЭПХ", г. Санкт-Петербург, Россия (RU) |
Производитель / Заявитель
АО "РЭПХ"
Поверка
| Межповерочный интервал / Периодичность поверки | 12 мес. |
| Методика поверки | Поверка проводится по ИЯТЛ.421413.104-03 МП (2015 г.). |
Поверители
Скачать
|
Описание типа РБ 03 14 6047 16 [2016-11-03]
rb-03-14-6047-16_2016-11-03.pdf
|
Скачать |
Описание типа
Назначение
Системы контроля активного магнитного подвеса (далее - СКАМП) предназначены для измерений текущих значений параметров работы компрессоров, нагнетателей, генераторов, электродвигателей (далее - машин вращения): частоты вращения ротора; линейного смещения и амплитуды виброперемещения ротора машины вращения в радиальных и осевом направлениях; температуры электромагнитов системы активного магнитного подвеса ротора машины вращения.
Описание
Система состоит из датчиков, установленных на машине вращения, и электронного шкафа управления ЕЗОО-ЗО . на входы которого поступают аналоговые сигналы от датчиков. В составе системы работают 5 каналов измерений линейного смещения и амплитуды виброперемещения ротора (по две координаты в радиальных направлениях в каждой из радиальных опор и одна координата в осевом направлении осевой опоры), 4 канала измерений температуры на корпусах электромагнитов и канал измерений частоты вращения ротора.
Измерительный канал (далее - ИК) линейного смещения и амплитуды виброперемещения ротора имеет следующий принцип действия: при отклонении ротора от центрального положения индуктивными датчиками положения ротора по каждой из 5 осей формируются аналоговые сигналы частотой 20 кГц. которые поступают на соответствующие входы шкафа управления ЕЗОО-ЗО. Аналоговые сигналы линейного смещения преобразуются в цифровую форму и обрабатываются контроллером шкафа ЕЗОО-ЗО.
Величина амплитуды виброиеремещения ротора вычисляется посредством математической обработки цифрового сигнала линейного смещения, при котором производится спектральное преобразование Фурье с выделением амплитудного значения первой гармоники, соответствующей частоте вращения ротора.
ИК температуры электромагнитов имеет следующий принцип действия: при измерении температуры корпусов электромагнитов происходит изменение сопротивлений установленных на них датчиков Pt 100 (элементы чувствительные из платины технические ЧЭПТ. производства ЗАО «ТЕРМИКО». Госреестр № 46154-10). Сигналы с датчиков поступают на соответствующие входы шкафа управления ЕЗОО-З, где происходит их аналого-цифровое преобразование. Далее, с помощью нормирующих усилителей, расположенных в шкафе ЕЗОО-ЗО. сигналы от термометров сопротивления преобразуются в унифицированные токовые сигналы 4-20 мА с последующим выводом на сигнальные разьемы шкафа.
ИК частоты вращения ротора имеет следующий принцип действия: индуктивный датчик оборотов вала устанавливается в непосредственной близости от контролируемого участка ротора и при прохождении мимо него метки ротора генерирует импульс, поступающий на вход счетчика импульсов шкафа ЕЗОО-ЗО.
В контроллере СКАМП параметры линейного смещения ротора, амплитуды виброиеремещения ротора, температуры, частоты вращения обрабатываются и передаются на выходной интерфейс RS 232/RS 485 по протоколу Modbus; параметры линейного смещения ротора, температуры, частоты вращения - на выходные сигнальные интерфейсы в виде аналоговых сигналов от 4 до 20 мА.
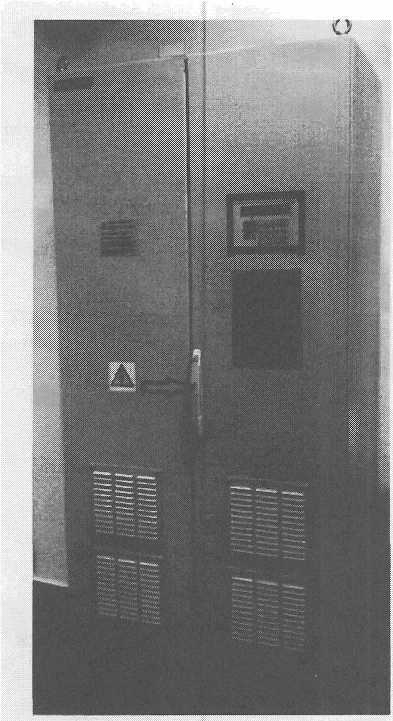
Внешний вид СКАМП показан на рисунке 1: шкаф управления ЕЗОО-ЗО, вид спереди. Защита от несанкционированного доступа в шкаф осуществляется с помощью пломбы, проволока которой продевается в отверстие ручки двери шкафа. Место пломбировки указано стрелкой.
Рисунок 1 - Внешний вид СКАМП
Программное обеспечение
В контроллере управления СКАМП применено специализированное ПО - Superwin. Функции ПО заключаются в обеспечении измерений параметров магнитного подвеса, обработке, представлении, записи и хранении измерительной информации.
Идентификационные признаки программного обеспечения указаны в таблице 1.
Таблица 1 - Идентификационные данные (признаки) программного обеспечения
|
Идентификационные данные (признаки) |
Значение |
|
Идентификационное наименование ПО |
Superwin 5/2 300v |
|
Номер версии (идентификационный номер) ПО |
5.2 |
|
Цифровой идентификатор ПО |
2050019 |
|
Другие идентификационные данные, если имеются |
superwin.dll |
Метрологические характеристики СКАМП, указанные в таблице 2, нормированы с учетом ПО.
Зашита программного обеспечения обеспечивается с помощью ведения журналов фиксации ошибок, фиксации изменений параметров, защиты прав пользователей и входа с помощью пароля, применена механическая защита аппаратных средств для исключения физического доступа к носителям программного обеспечения.
Уровень защиты — «средний» в соответствии с Р 50.2.077-2014.
Технические характеристики
Таблица 2 - Основные метрологические и технические характеристики
|
1 Характеристика |
Значение |
|
। Количество измерительных каналов частоты вращения ротора |
1 |
|
i Количество измерительных каналов линейного смещения и : амплитуды виброперемещения ротора |
5 |
|
Количество измерительных каналов температуры |
4 |
|
Диапазон измерений частоты вращения ротора, об/мин 1 : : ' L„ / |
от 1000 до 14000, от 14001 до 20000 |
|
Пределы допускаемой приведенной погрешности измерительных каналов частоты вращения, % (в диапазонах измерений, об/мин): от 1000 до 14000 о1 14001 до 20000 |
± 1 ±0,5 |
|
Диапазон измерений температуры, °C |
от минус 50 до плюс 200 |
|
Пределы допускаемой абсолютной погрешности измерительных каналов температуры, °C |
± 10 |
|
Диапазон измерений линейного смещения ротора, мкм: - по радиальным направлениям - по осевому направлению |
от минус 333 до плюс 333 от минус 500 до плюс 500 |
|
Диапазон измерений амплитуды виброперемещения ротора, мкм: - но радиальным направлениям - по осевом) направлению |
от 0 до 333 от 0 до 500 |
|
Пределы допускаемой приведенной погрешности измерительных каналов линейного смещения и амплитуды вибронеремещения ротора, % |
± 10 |
|
Коэффициенты преобразования измерительных каналов: Кр радиального линейного смещения и амплитуды виброперемещения ротора, мВ/мкм Кос осевого линейного смещения и амплитуды вибронеремещения ротора. мВ/мкм |
30 20 |
|
I [ределы допускаемой относительной погрешности коэффициентов преобразования измерительных каналов системы, % |
± 10 |
|
У с л о ви я экс п л у ата ци и: - температура окружающей среды, шкаф управления. °C -температура окружающей среды, датчики, °C - 01 носительная влажность воздуха при 35 °C. не более, % - атмосферное давление. кПа |
от 0 до 40 от минус 40 до плюс 55 90 от 84,0 до 106,7 |
|
Габаритные размеры шкафа управления, мм. не более: |
1450 x 800 x 2300 |
|
Масса шкафа управления, кг. не более: |
500 |
Продолжение таблицы 2
|
Параметры электропитания системы |
напряжение переменного тока частотой (50+1) Гц, 380 В |
|
Потребляемая мощность. В-А. не более |
5500 |
|
Средняя наработка на отказ, ч, не менее |
100000 |
|
Средний срок службы, лет, не менее |
25 |
Знак утверждения типа
наносится типографским способом на титульные листы эксплуатационной документации, под наименованием эксплуатационного документа, по центру.
Комплектность
Таблица 3 - Комплект поставки
|
Наименование и обозначение изделия |
Количество, шт. |
|
Шкаф управления ЕЗОО-ЗО |
1 шт. |
|
Комплект датчиков |
1 шт. |
|
Руководство по эксплуатации ИЯТЛ.421413.104 РЭ |
1 экз. |
|
Паспорт ИЯТЛ.421413.104 ПС |
1 экз. |
|
Методика поверки ИЯТЛ.421413.104 МП |
1 экз. |
Поверка
осуществляется по документу' ИЯТЛ.421413.104 МП «Системы контроля активного магнитного подвеса. Методика поверки», утверждённому ФБУ "Нижегородский ЦСМ” в ноябре 2015 г.
Основные средства поверки: осциллограф цифровой Tektronix TPS 2024, диапазон от 0 до 10 В, до 1 МГц, погрешность ± 3.0 %; индикатор VOGEL мод. 24000, диапазон от 0 до 1 мм, погрешность ± 3 мкм; калибратор многофункциональный MSX-П, измерение и воспроизведение постоянного тока, диапазон от 0 до 25 мА, погрешность ± 0,025 %; генератор сигналов специальной формы АКИП-3402. диапазон частот выходного сигнала 1 мкГц -50 МГц (синус), амплитуда выходного сигнала 1 мВ пик - 10 В пик, погрешность установки: частоты ± 2x10’6, амплитуды ± (1 % +1 мВ); фототахометр электронный Testo-465, диапазон от 20 до 99999 об/мин., погрешность ± 0,05 %.
Знак поверки в виде оттиска или наклейки наносится на свидетельство о поверке.
Сведения о методах измерений
приведены в ИЯТЛ.421413.104 РЭ «Система контроля активного магнитного подвеса. Руководство по эксплуатации»
Нормативные документы
ГОСТ Р 8.596-2002 «ГСИ. Метрологическое обеспечение измерительных систем. Основные положения»
ГУ 4252-043-71439231-2015 «Система контроля активного магнитного подвеса. Технические условия»
Смотрите также